In this tutorial, I provide a detailed walkthrough on how to generate 3D Voxels from Point Clouds using Python. At the end, you will be able to automate the creation of 3D Voxel Datasets from Large Point Clouds automatically.
How to Generate 3D Voxels from Point Clouds with Python
Welcome to this tutorial on 3D voxels and voxelization techniques. We have explored various methods for working with 3D data (point clouds, 3D meshes, CAD Files). Now, we delve into the captivating world of voxels, the 3D equivalent of pixels, and how they empower us to represent and analyze complex 3D structures.
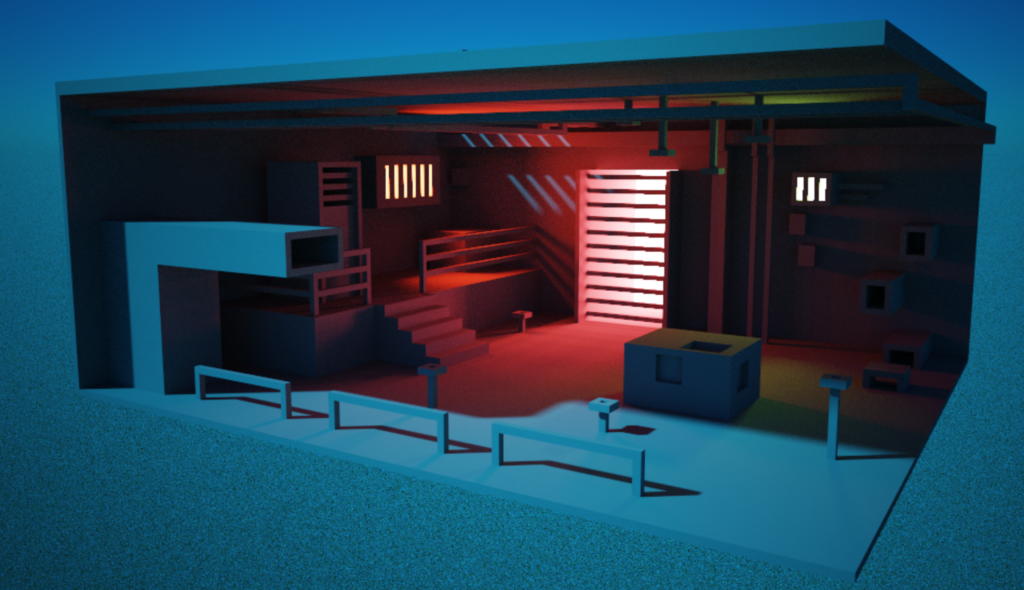
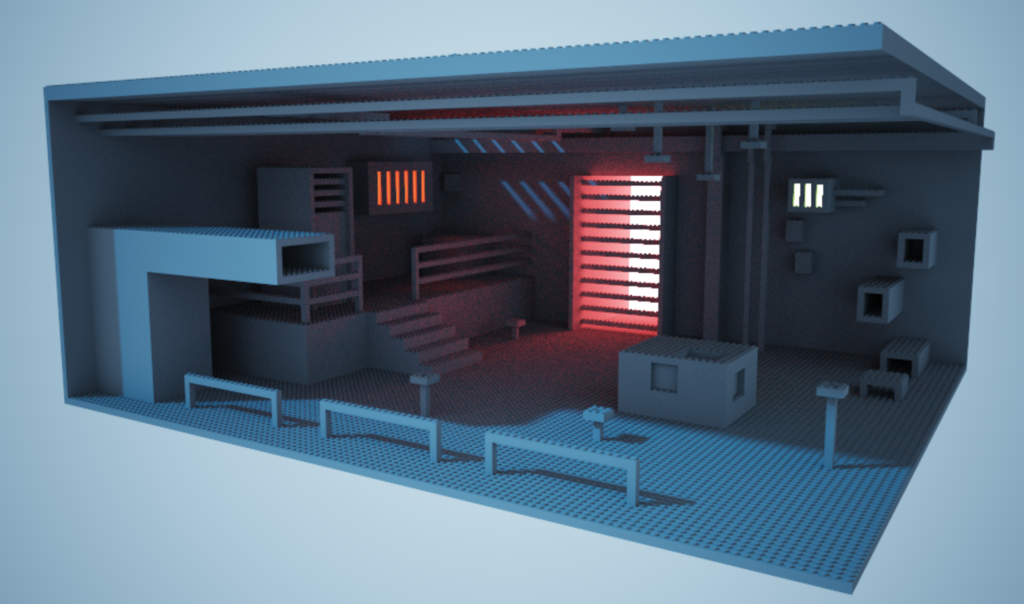
The result of the learning is a new automated Python App that converts a 3D point cloud into a 3D voxel dataset usable outside of the Python environment (with software like CloudCompare, MagicaVoxel, or Minecraft). If this sounds like cherry blossoms to you, then it is time for 3D Voxel Fun!
Resources and Materials 🍇
- The Point Cloud Dataset: Google Drive
- The Software: CloudCompare and MagicaVoxel
- The Code: Github (License MIT; Release Soon; please cite for re-use)
- Additionnal Resources
- How to Automate Voxel Modelling of 3D Point Cloud with Python: Medium Article
- Voxel-based 3D Point Cloud Semantic Segmentation: Unsupervised Geometric and Relationship Featuring vs Deep Learning Methods: Research Paper (.pdf)
Why we use Voxels and 3D Voxelization
Each voxel is essentially a tiny cube, existing within a three-dimensional grid. By assigning properties like color, material, and density to individual voxels, we can construct intricate 3D models. This approach offers a powerful toolset for engineers and researchers, pushing the boundaries of 3D innovation across various fields.
Imagine a world built not from smooth surfaces but tiny Lego bricks.
This concept comes to life in computer graphics with voxels, the three-dimensional counterparts of pixels. Just as pixels form the foundation of digital images, voxels are the building blocks for creating and manipulating 3D objects.
Application of 3D voxels for engineers and researchers
The world of engineering and research is constantly pushing the boundaries of what’s possible. In this pursuit, innovative tools are crucial for tackling complex challenges and creating groundbreaking solutions. Let’s quickly delve into how engineers and researchers are leveraging Voxel technology to drive innovation, in a selection of 3 Clear Applications.
Precision in Design and Manufacturing
Voxel-based modeling allows for highly detailed and precise representations of objects. This accuracy is crucial in engineering disciplines like mechanical design, where intricate components require meticulous planning. Voxel models can be directly translated into manufacturing processes like 3D printing, ensuring a seamless transition from concept to creation.
Procedural Generation and Exploration
Voxel technology facilitates the creation of complex and dynamic 3D environments. By manipulating voxel properties according to pre-defined rules, engineers can generate realistic landscapes and virtual cities or even simulate natural phenomena like erosion and growth. This opens doors for urban planning and environmental modeling researchers to explore various scenarios and test design ideas.
3D Data Analysis and Manipulation
Voxel representations can be particularly useful for analyzing and manipulating 3D data obtained from various sources like medical scans or LiDAR (Light Detection and Ranging) sensors. By converting point cloud data into voxels, researchers can gain a more comprehensive understanding of the underlying 3D structure and perform advanced analysis tasks such as volume measurement or feature extraction.
Integration with Cutting-Edge Technologies
Voxel-based environments are valuable for developing and integrating cutting-edge technologies like artificial intelligence and virtual reality (VR). AI algorithms can learn and reason within voxel worlds, while VR experiences can leverage voxels to create immersive and interactive environments.
These are just a few examples of how 3D voxels empower engineers and researchers. As technology evolves, we can expect even more exciting advancements in design, simulation, data analysis, and beyond. So let me share with you a selection of the 3D R&D State-of-The-Art
3D R&D State of the Art for 3D Voxels
3D voxels from point clouds are a valuable technique in 3D data processing and have applications in research and development. I compiled a Connected Papers View to help you navigate the latest exciting articles:
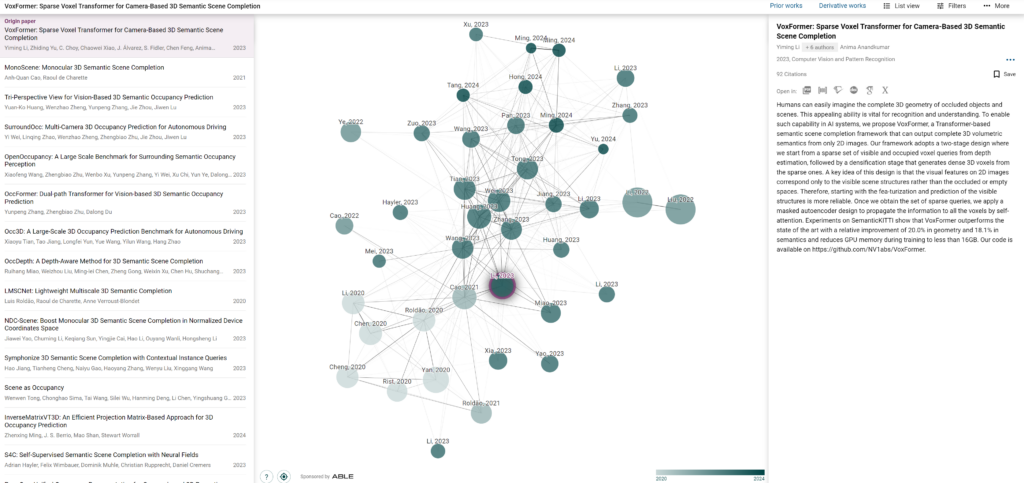
Link to Graph of Papers on Voxels: 🍇 Connected Papers Graph
Here’s a quick look at some of the top research articles published in the last years (2019-2024) that provide some interesting, cutting-edge knowledge of 3D voxel advancements.
🦊 Florent: I filtered to 📜 open-access papers, have a .pdf accessible 📄, and the 💻 code implementation as well 😊:
My Top 5 Voxel Papers Selection
- PETR: Position Embedding Transformation for Multi-View 3D Object Detection.
This paper is interesting as it provides a position embedding transformation (PETR) for multi-view 3D object detection. PETR encodes the position information of 3D coordinates into image features, producing the 3D position-aware features.
📄Research Article (2022, European Conference on Computer Vision): https://doi.org/10.48550/arXiv.2203.05625 - BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection.
This work proposes a new 3D object detector with a trustworthy depth estimation, dubbed BEVDepth, for camera-based Bird’s Eye-View ~(BEV) 3D object detection. The work is based on a key observation: depth estimation in recent approaches is surprisingly inadequate, given that depth is essential to camera 3D detection.
📄Research Article (2022, AAAI Conference on Artificial Intelligence): https://doi.org/10.48550/arXiv.2206.10092 - VoxFormer: Sparse Voxel Transformer for Camera-Based 3D Semantic Scene Completion.
Humans can easily imagine the complete 3D geometry of occluded objects and scenes. This appealing ability is vital for recognition and understanding, the authors propose VoxFormer, a Transformer-based semantic scene completion framework that can output complete 3D volumetric semantics from only 2D images to enable such capability in AI systems.
📄Research Article (2023, Computer Vision and Pattern Recognition): https://doi.org/10.1109/CVPR52729.2023.00877 - OccFormer: Dual-path Transformer for Vision-based 3D Semantic Occupancy Prediction.
This paper presents OccFormer, a dual-path transformer network that effectively processes the 3D volume for semantic occupancy prediction. OccFormer achieves a long-range, dynamic, and efficient encoding of the camera-generated 3D voxel features.
📄Research Article (2023, IEEE International Conference on Computer Vision): https://doi.org/10.1109/ICCV51070.2023.00865 - LMSCNet: Lightweight Multiscale 3D Semantic Completion.
The authors introduce a new multiscale 3D semantic scene completion approach from voxelized sparse 3D LiDAR scans. As opposed to the literature, they use a 2D U-Net backbone with comprehensive multiscale skip connections to enhance feature flow, along with 3D segmentation heads.
📄Research Article (2020, International Conference on 3D Vision): https://doi.org/10.1109/3DV50981.2020.00021
These are just 5 exciting research happening in the realm of 3D voxels. As you explore the linked articles, you’ll gain a deeper understanding of the various approaches researchers are taking to push the boundaries of what we make them do (the voxels 😊). If you feel it is time to start creating some nice Voxel Dataset, I happily share the 3D Voxel Construction Methodology.
3D Voxel Methodology
The 3D Voxel Methodology aims to transform a 3D point cloud into a 3D voxel dataset. Here’s a breakdown of the steps that we follow:
1. Environment Initialization
2. Dataset Preparation
3. Creating a Voxel Grid
4. Generating a Single Voxel Entity
5. Automation for Voxels Generation
6. Classical Normal Computation
7. Voxel Dataset Post-Processing
8. Voxel Dataset Export
9. Perspectives
For clarity, the complete workflow is below.
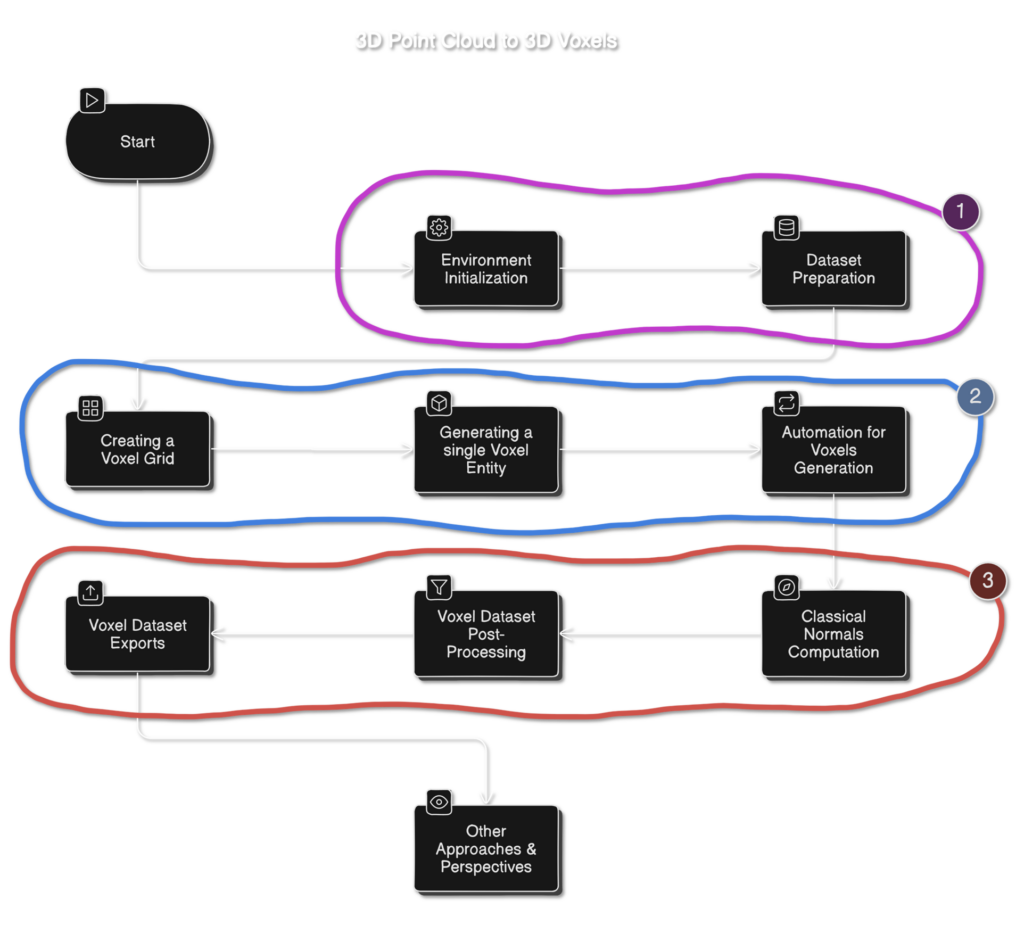
As you can see, this step-by-step journey starts with setting up the Python environment and preparing our point cloud dataset. We then delve into creating a voxel grid, the foundation upon which our 3D voxel world resides. We explore the construction of individual voxel entities and establish techniques to automate the generation of a complete 3D voxel dataset from your point cloud.
3D Voxels: Discussion and Conclusion
Here are my key take-aways:
- Converting point clouds to voxel data enables further processing and analysis using techniques like convolutional neural networks.
- This method provides a way to create 3D voxel datasets from point clouds using Python.
- There are alternative approaches to voxel generation beyond using Open3D.
I hope this provides a clear and informative walkthrough of how you can achieve the creation of an automated 3D Python App. I look forward to seeing you create the next big thing!

My 3D Recommendation 🍉
Generating 3DVoxel Datasets is just extremely useful. It permits to create a structure-aware dataset that is easy to handle, and provides an opening to several 3D Data Processing Tasks. If you want to develop Systems and Apps using 3D Voxels, I recommend hopping on the 3D Collector’s Pack while it is hot 🔥
If you want to get a tad more toward application-first or depth-first approaches, I curated several learning tracks and courses on this website to help you along your journey. Feel free to follow the ones that best suit your needs, and do not hesitate to reach out directly to me if you have any questions or if I can advise you on your current challenges!
Open-Access Knowledge
- Medium Tutorials and Articles: Standalone Guides and Tutorials on 3D Data Processing (5′ to 45′)
- Research Papers and Articles: Research Papers published as part of my public R&D work.
- Email Course: Access a 7-day E-Mail Course to Start your 3D Journey
- Youtube Education: Not articles, not research papers, open videos to learn everything around 3D.
3D Online Courses
- 3D Python Crash Course (Complete Standalone). 3D Coding with Python.
- 3D Reconstruction Course (Complete Standalone): Open-Source 3D Reconstruction (incl. NERF and Gaussian Splatting).
- 3D Point Cloud Course (Complete Standalone): Pragmatic, Complete, and Commercial Point Cloud Workflows.
- 3D Object Detection Course (3D Python Recommended): Practical 3D Object Detection with 3D Python.
- 3D Deep Learning Course (3D Python Recommended): Most-Advanced Course for Top AI Engineers and Researchers
3D Learning Tracks
- 3D Segmentation Deck: From Classical 3D Segmentation to 3D Deep Learning and Unsupervised Applications
- 3D Collector’s Pack: Complete Course Track to address both 3D Application and Code Layers.