A Quick Dive into Modern Point Cloud Workflow
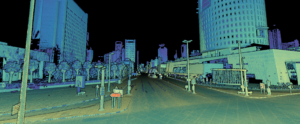
Designing a point cloud workflow is a powerful first-hand approach in 3D data projects. This article explores how processing massive point clouds efficiently isn’t about having more computing power. It’s about being more innovative with the resources you have. After analyzing hundreds of real-world projects, let me share identified patterns that consistently deliver better results […]
A Quick Dive into Modern Point Cloud Workflow Read More »