Extract Features from Point Clouds with Intelligence
From raw points to geometric descriptors, segmentation, and web-deployed intelligence. 5 lessons of feature extraction with Python, CloudCompare, and Potree.
See feature extraction in action
From raw points to classified, queryable 3D intelligence running in a browser.
Points per pipeline. Optimized for LiDAR and photogrammetric datasets.
Students trained worldwide across 80 countries.
Production experience distilled into structured, repeatable workflows.
You have a point cloud. But what does it mean?
You loaded a LAS file. You see a beautiful colored blob on screen. Your client asks, “Which of these points are the roof? How tall is the building? Is the facade planar or curved?” You have no answer, because raw points carry no meaning. They are geometry without intelligence.
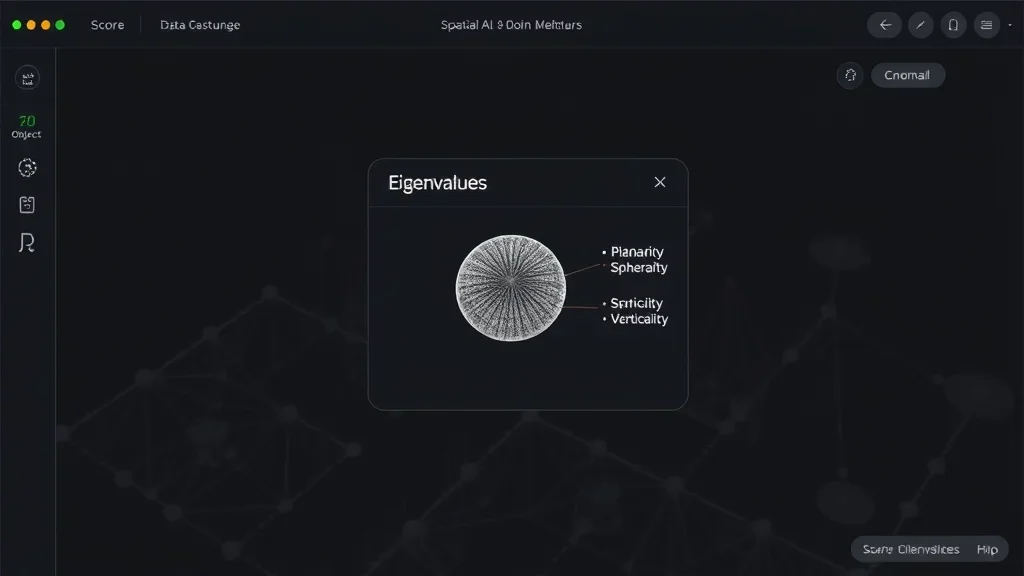
The answer is features. Every point needs a vector that describes its local neighborhood: planarity, verticality, curvature, density, color statistics. Once you have those features, classification, segmentation, and measurement all become trivial. That is what this course teaches you to extract.
Most 3D tutorials stop at loading and visualization. The real value is downstream: what you can compute from each point. Eigenvalue descriptors, normal-based features, density statistics. These are the atomic units of 3D intelligence. Miss this layer, and every machine learning pipeline above it is blind.
What you’ll build
Real feature extraction pipelines on real datasets.
Feature extraction engine
Compute per-point features at scale. Eigenvalue descriptors, curvature, planarity, normal vectors, and density statistics.
Feature-driven segmentation
Turn features into meaningful segments. RANSAC, DBSCAN, and region growing seeded by computed descriptors.
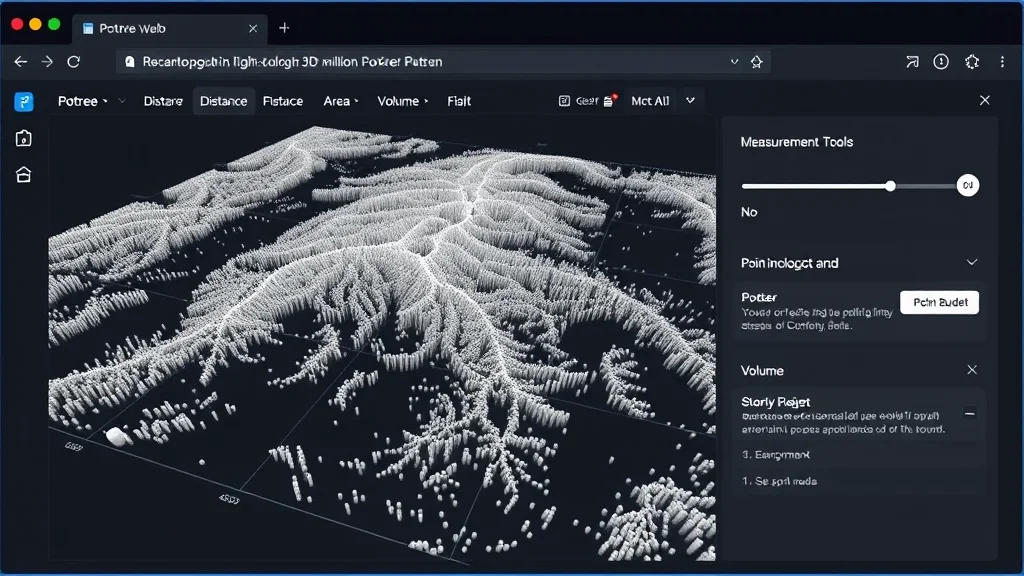
Potree web deliverables
Ship your extracted features to a browser. Potree-based viewers for interactive exploration of classified and analyzed scans.
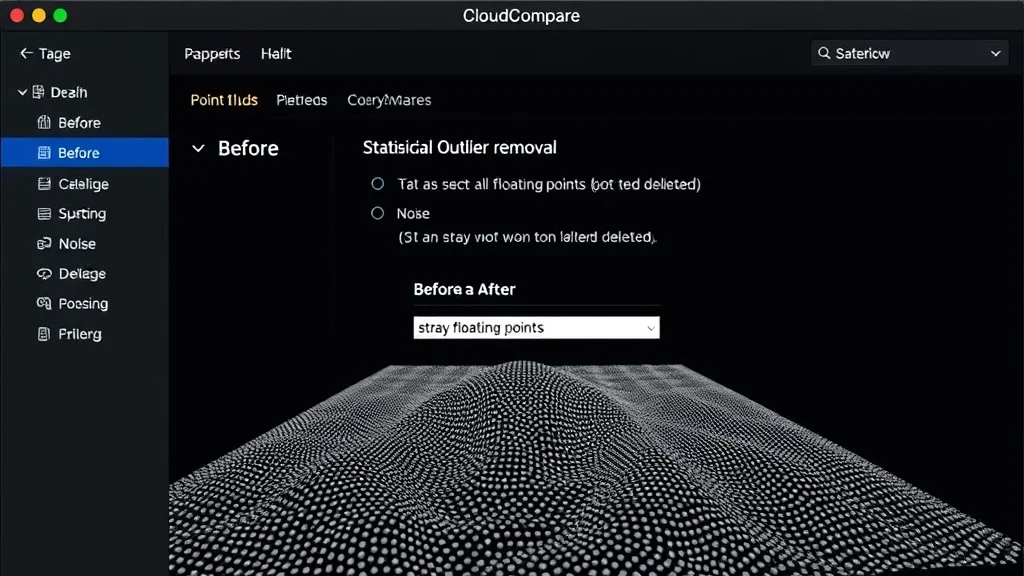
CloudCompare fundamentals
The GUI foundation. Feature extraction in CloudCompare before you automate it in Python. Build the intuition first, then script it.
Python automation
Turn the GUI workflow into a script. Batch feature extraction across hundreds of point clouds with Open3D and NumPy.
Web delivery
Convert and stream extracted features in the browser. Potree integration for interactive client-facing deliverables.
Feature extraction is the quiet hero of every 3D pipeline. I spent years tuning these descriptors on industrial datasets before I built a course around them. What you learn here sits under every machine learning model, every classification workflow, every measurement system I have ever shipped.
How this course works
Hands-on, Python-first, and built around real datasets.
100% asynchronous
Access everything 24/7 on the LMS. Self-paced. No live sessions required.
GUI + code approach
Every feature starts in CloudCompare (visual, intuitive), then gets scripted in Python (fast, repeatable). The best of both worlds.
Real LiDAR datasets
Airborne LiDAR, terrestrial scans, photogrammetric clouds. Millions of real points, not synthetic data.
Production patterns
Memory-aware feature computation, parallel processing, and the error handling you need for scan-scale workflows.
Lifetime access
One payment, permanent access. Every future update included, including new descriptors as I add them.
Foundation for ML
Features are the input layer of every 3D machine learning pipeline. Master them here, and every downstream course builds on solid ground.
There is no mystery in 3D machine learning. Every classifier, every segmentation network, every measurement tool consumes features as input. If the features are clean, the downstream pipeline is easy. If the features are noisy, no amount of deep learning will save you. This course makes sure yours are clean.
The Curriculum
5 modules. From fundamentals to web-deployed feature intelligence.
Prerequisites
This course is for engineers and researchers who want to understand what features to compute, why they matter, and how to extract them at scale.
- Python (beginner+): comfortable with loops, functions, and basic NumPy operations
- Basic 3D knowledge: you know what a point cloud is and have opened one in CloudCompare or a similar tool
- Hardware: 16 GB RAM recommended for feature extraction on large datasets. No GPU required
- Software: Python, Open3D, CloudCompare, Potree. All free and open-source
No prior feature extraction experience required. This is the focused, extraction-first course.
The foundation. LAS, E57, PLY formats, CloudCompare environment setup, and point cloud I/O.
The core of the course. Compute eigenvalue features, normals, curvatures, and density statistics. The vocabulary of 3D intelligence.
Use features to segment and classify. RANSAC, DBSCAN, and region growing powered by computed descriptors.
Turn the GUI workflow into code. Open3D and NumPy pipelines that batch-extract features across hundreds of clouds.
Ship your feature-rich point clouds to the browser. Potree conversion, hosting, and client-ready web viewers.

Your instructor
Dr. Florent Poux
I’ve spent 12+ years in 3D geospatial: from field surveys with total stations to building AI systems for Fortune 500 companies. I published the O’Reilly book on 3D Data Science with Python. I’ve advised startups valued at over 15M EUR. I’ve held a professorship, taught at university, and led R&D for some of the largest organizations in the space.
I don’t teach syntax. I teach judgment. Every module is built around real decisions I’ve faced in production. Which neural renderer fits an industrial inspection job. How to architect a semantic pipeline that doesn’t choke on 500M points. When to use algorithmic methods and when to switch to deep learning.
What students say
Engineers, GIS professionals, and researchers from 80 countries.
“Our team processed 200M points for a highway survey. Before this course, we were stuck at 10M with crashes. The memory management module saved us weeks of work.”

“I’m a surveyor with 20 years of field experience. This gave me the Python and AI skills to modernize our entire workflow. Best investment I’ve made in my career.”
“RANSAC plus DBSCAN on a 120M-point mining dataset — segmented, volumetric change detected, and report ready in one afternoon. That used to take a week.”
“This course is the foundation I wish I had when I started with LiDAR. The feature extraction module alone reshaped how I approach every project.”
Get lifetime access
One payment. Every module, every update, every feature pipeline.
Point Cloud Feature Intelligence
Complete feature extraction curriculum + source code + real datasets + lifetime updates
- 5 modules (10+ hours, 5 lessons)i
- Complete Python source code + datasets
- CloudCompare + Python workflows
- Potree web deployment project
- Lifetime access + all future updatesi
- 90-day results guaranteei
Zero-risk guarantee: If you don’t see real results within 90 days, I’ll refund you in full. No questions.
The complete ecosystem
3D AI Architect Program
The complete spatial AI curriculum, delivered in 3 tiers. Pick the depth that matches where you are — Foundations to get moving, Professional for the full OS stack, Ultimate for live access and priority support.
- 3D AI Acceleratori: 17 episodes in 6 acts
- 3D Course Libraryi: 24+ standalone courses
- All 4 OS courses (Professional & Ultimate tiers)
- Neurones 3D software access
- Monthly drop-in sessions with Dr. Poux (Ultimate)
- Spatial AI job and market intel
- Priority support + services access (Ultimate)
- 300+ hours of content
What you’re getting access to
Everything I’ve built over 12+ years, from land surveying in the field to advising 15M EUR startups, compressed into one curriculum you can start today. Delivered by the first QUALIOPI-certified 3D geospatial academy.
Every pipeline was battle-tested on Fortune 500 projects processing billions of points. You’re getting the real playbook, not theory.
Methods validated by peer-reviewed publications, the ISPRS scientific community, and 1,500+ academic citations. Not guesswork.
Built by someone who surveyed in the field, defended a PhD, advised funded startups, and shipped products to Fortune 500 clients.
I share more free content than most people put behind a paywall. That’s intentional. I want you to know exactly what you’re getting before you invest. This course is the concentrated, structured version of everything I know. No fluff. No filler. Just the production path.
Find the right path for you
From single courses to the complete ecosystem.
| Feature | Standalone Course | Point Cloud Feature Intelligence | Course Library | 3D AI Architecti | Enterprise |
|---|---|---|---|---|---|
| Courses included | 1 topic | 5 modules | Full catalogi | 3 OS courses + Library (tiered) | Custom |
| Hours of content | 2-8h | 10+ hours | 150+ hours | 300+ hours (tiered) | Custom |
| Production source code | ✓ | ✓ | ✓ | ✓ | ✓ |
| Lifetime access | ✓ | ✓ | – | ✓ | ✓ |
| 3D AI Accelerator Tracki | – | – | – | ✓ | ✓ |
| Neurones 3D softwarei | – | – | – | ✓ | ✓ |
| Spatial AI job & market inteli | – | – | – | ✓ | ✓ |
| Monthly drop-in sessionsi | – | – | – | ✓ | ✓ |
| Priority support + services accessi | – | – | – | ✓ tiered | ✓ |
| Custom onboardingi | – | – | – | – | ✓ |
| Team licensing | – | – | – | – | ✓ |
| Price | €97 – €497 | €197 | €1,297 | Starts at €1,999 | On request |
Straight answers
Do I need prior 3D or point cloud experience?
Some familiarity helps. You should know what a point cloud is and have opened one in CloudCompare. I build the feature extraction layer from the ground up.
What software do I need?
Python, Open3D, NumPy, CloudCompare, and Potree. All free and open-source. No paid licenses required.
What hardware do I need?
Minimum 8 GB RAM for the basic modules, 16 GB+ recommended for large dataset feature extraction. No GPU required.
How long do I have access?
Lifetime. One payment, permanent access. Every future update is included.
What’s the refund policy?
90 days. Extract features from your own data, build a segmentation pipeline. If you don’t see results, email me for a full refund.
How is this different from the full Point Cloud Intelligence course?
The full Point Cloud Intelligence course (26005) covers the whole pipeline from data loading to 3D modeling across 25+ hours. This course zooms in on feature extraction and segmentation, at a lower price for focused learners.
Is this enough to start a 3D machine learning career?
This course gives you the feature layer, which is the input to every 3D machine learning pipeline. Combined with the 3D Deep Learning courses, it rounds out the skill set.
Can I upgrade to the full Point Cloud Intelligence course later?
Yes. Contact me for upgrade credit toward the full course (26005) or the Spatial OS.
Not sure if this course fits?
If you have specific questions about how the curriculum applies to your role, your team’s needs, or your technical background, I’m happy to help you figure it out before you commit.
Book a 15-min call