Build a 3D Detection Engine in Python
From raw LiDAR to clean 3D bounding boxes. 44 lessons. RANSAC, DBSCAN, PCA, KD-Tree, and SAM for 3D. A detection engine you own.
See 3D object detection in action
Raw point cloud in, labeled 3D bounding boxes out. Every algorithm explained, every line of code available.
Points per scan. Processed by a detection engine you’ve built yourself, from ADAS datasets to custom captures.
Students trained worldwide across 80 countries.
Point cloud detection experience distilled into reusable workflows.
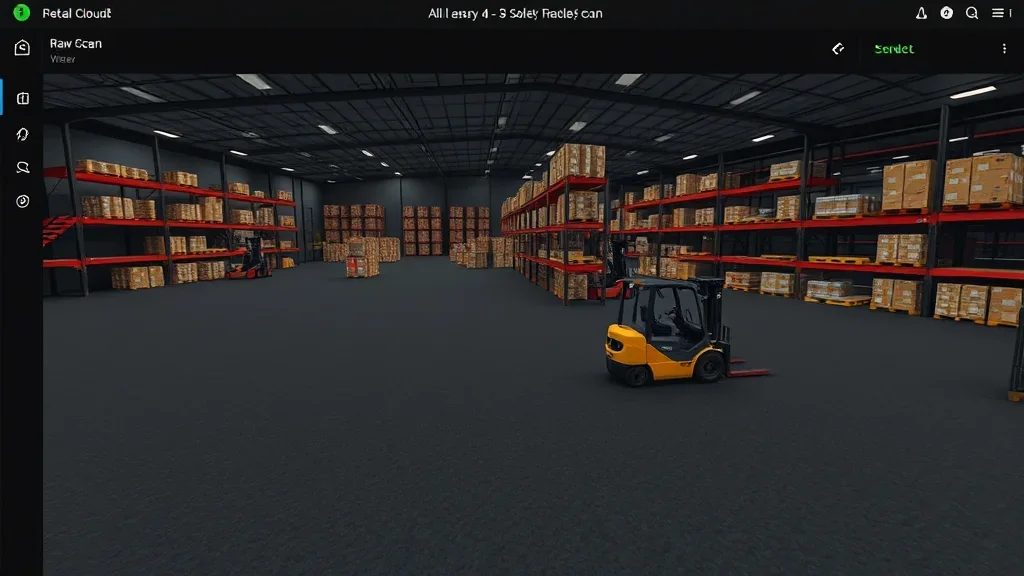
You see objects in your point cloud. Your code doesn’t.
You open a LiDAR scan in CloudCompare. You see cars, pedestrians, traffic signs. Obvious. But when you ask Python to extract them, you get a wall of unlabeled points. No labels, no groups, no bounding boxes. Just XYZ. Getting from that wall to clean, labeled 3D objects is the hard part, and most tutorials skip it.
The detection pipeline is a stack of classical algorithms that still beat deep learning for many use cases. RANSAC for the ground plane. DBSCAN for clustering what’s left. KD-Tree for fast spatial queries. PCA for bounding-box extraction. Each one has a tuning knob that changes everything. This course teaches you those knobs.
Every production 3D detection pipeline I’ve shipped mixes classical methods with learned ones. The classical stack runs fast, needs no training data, and handles edge cases gracefully. You should know how to build it, end to end, before you reach for a neural network. This course gives you that engine. Bonus: the final module shows how to plug in SAM for 3D, bridging classical and foundation-model approaches. Both worlds, one engine.
What you’ll build
A full 3D object detection engine, piece by piece, in Python.
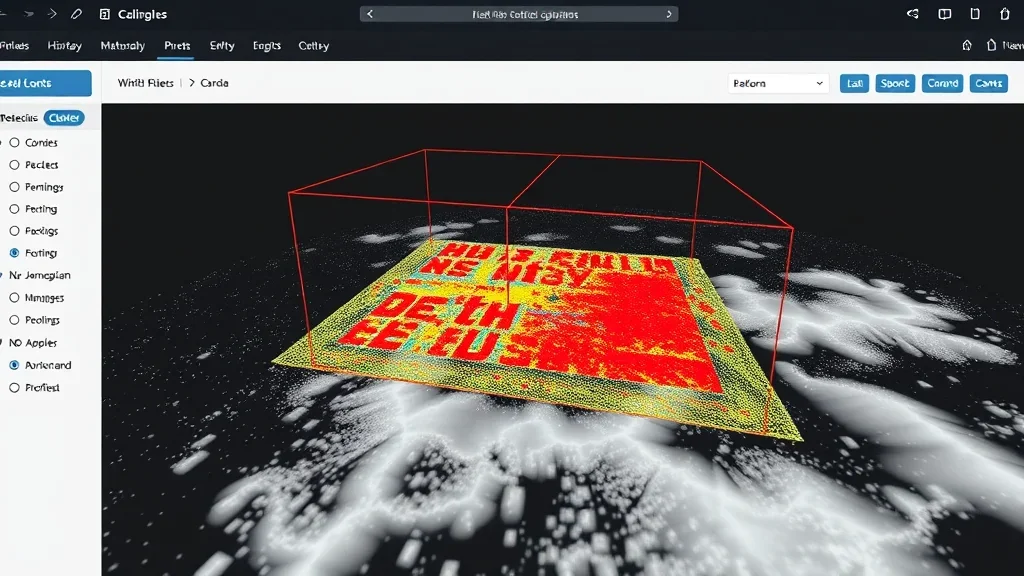
RANSAC ground extraction
A working RANSAC implementation for ground plane detection. Plus n-order RANSAC for multi-surface scenes.
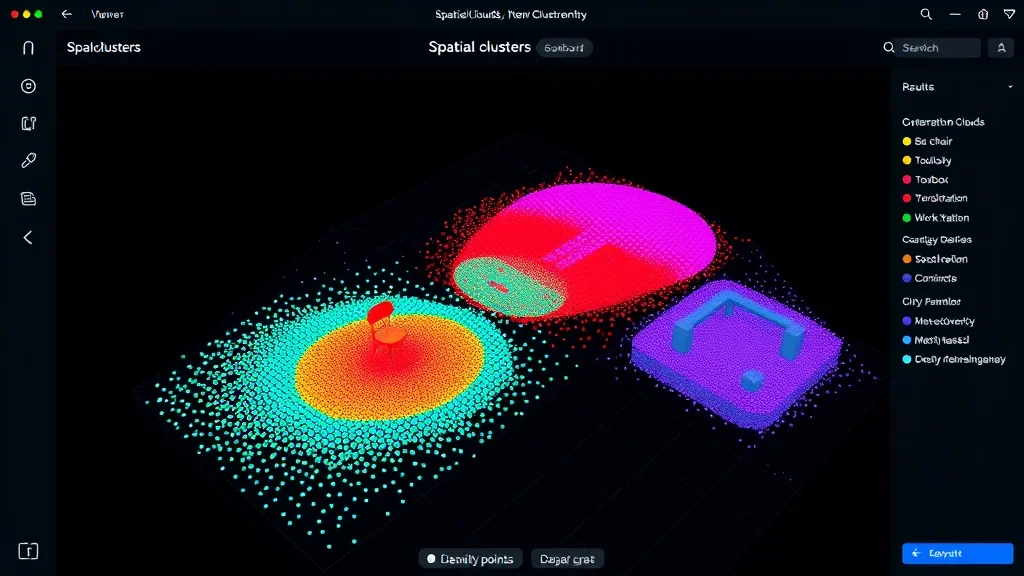
DBSCAN and HDBSCAN
Cluster non-ground points into object candidates. DBSCAN and its hierarchical extension HDBSCAN. With all the tuning heuristics.
PCA bounding boxes
Extract clean 3D bounding boxes per cluster using PCA. Oriented boxes, not axis-aligned. The output your downstream app actually needs.
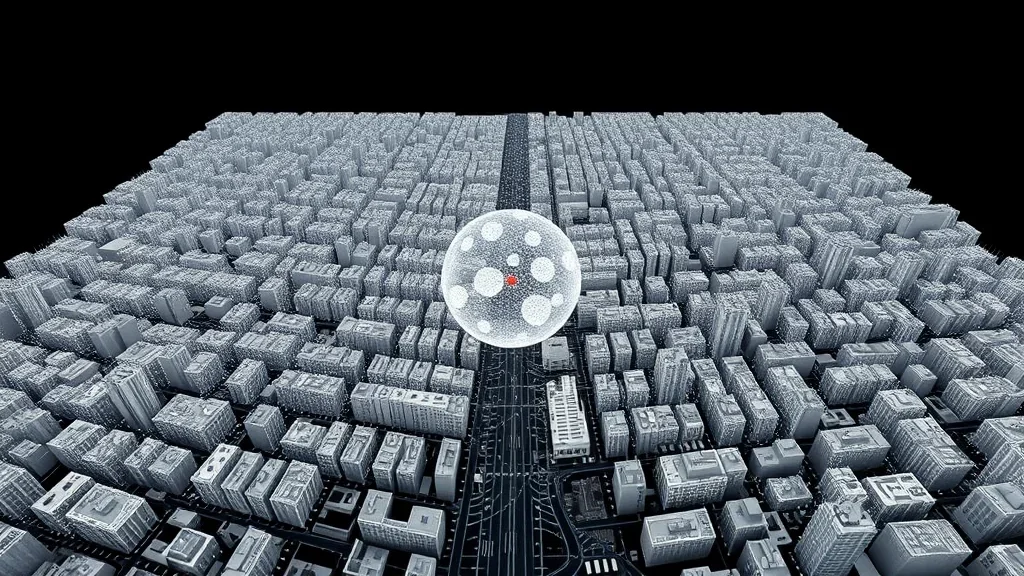
KD-Tree spatial search
Fast nearest-neighbor queries at scale. KD-Tree construction, search patterns, and the speed gains that matter in production.
Metrics and evaluation
Confusion matrices, IoU, precision, recall. Two full lessons on how to measure your detector honestly.

SAM for 3D (bonus)
Plug SAM into the pipeline. 2D foundation segmentation projected onto 3D points. The bridge between classical detection and foundation models.
I built this course as the honest hands-on path into 3D object detection. Every algorithm here, I’ve used on client projects: automotive ADAS, surveying, facility management. The detection engine you build is the same pattern I charge consulting fees to deploy. You get it structured and documented, with every line of Python available.
How this course works
Hands-on, algorithm-focused, and honest about what classical methods can do.
100% asynchronous
Every lesson on the LMS, 24/7. Self-paced.
Code-along projects
Every algorithm ships with runnable Python. Clone the repo, follow along, tune the parameters yourself.
Real ADAS data
Automotive LiDAR, terrestrial scans, and indoor environments. The datasets the classical stack actually shines on.
Algorithm-first pacing
Each algorithm gets its own lesson, with the math, the code, and the tuning story. No rushed montages.
Lifetime access
One payment, permanent access. Every update included.
Upgrade path
Pairs perfectly with 3D Deep Learning Foundations and the 3D Deep Learning OS. Classical + learned = production.
This course is deliberately classical-first. That’s not a limitation. Real 3D detection pipelines almost always start with a classical stack and layer learned components on top. Understanding RANSAC, DBSCAN, KD-Tree, and PCA deeply is the prerequisite for every 3D detection project I’ve ever delivered. Skip this layer and your deep learning experiments collapse the moment the data drifts. Build it, and you have a detection engine that works even without a GPU.
The Curriculum
6 modules, 44 lessons. From LiDAR setup to a complete object detection engine.
Prerequisites
This course is designed for Python developers who want to get serious about 3D detection.
- Python (beginner+): comfortable with loops, functions, and file I/O. NumPy basics helpful
- Basic math: high school geometry. I explain vectors, planes, and covariance as we go
- Hardware: 8 GB RAM minimum, 16 GB+ recommended for large scans. No GPU required for the classical stack
- Software: Python, Open3D, NumPy, Matplotlib, Spyder (optional). All free and open source
No prior 3D experience required. I build the intuition from the ground up.
The orientation layer. Environment setup, 3D math basics, NumPy warmup, and visualization tooling. Everything else depends on these ten lessons.
How point clouds live in Python. Data representations, the 3D machine learning context, and the pre-processing that every downstream algorithm requires.
Downsample with voxel grids. Extract the ground plane with RANSAC. Extend to multi-surface scenes with n-order RANSAC.
DBSCAN, HDBSCAN, and K-NN clustering. Plus KD-Tree construction and query patterns for production-speed detection.
PCA in depth. PCA for feature extraction. Oriented 3D bounding-box extraction per cluster. The final step that turns clusters into usable detections.
Ship it. Evaluation metrics, Colab deployment, 3D Python app patterns. Bonus: SAM for 3D point clouds.

Your instructor
Dr. Florent Poux
I’ve spent 12+ years in 3D geospatial: from field surveys with total stations to building AI systems for Fortune 500 companies. I published the O’Reilly book on 3D Data Science with Python. I’ve advised startups valued at over 15M EUR. I’ve held a professorship, taught at university, and led R&D for some of the largest organizations in the space.
I don’t teach syntax. I teach judgment. Every module is built around real decisions I’ve faced in production. Which neural renderer fits an industrial inspection job. How to architect a semantic pipeline that doesn’t choke on 500M points. When to use algorithmic methods and when to switch to deep learning.
What students say
Engineers, automotive researchers, and 3D data practitioners from 80 countries.
“Our team processed 200M points for a highway survey. Before this course, we were stuck at 10M with crashes. The memory management module saved us weeks of work.”

“I’m a surveyor with 20 years of field experience. This gave me the Python and AI skills to modernize our entire workflow. Best investment I’ve made in my career.”
“RANSAC plus DBSCAN on a 120M-point mining dataset — segmented, volumetric change detected, and report ready in one afternoon. That used to take a week.”
“This course is the foundation I wish I had when I started with LiDAR. The feature extraction module alone reshaped how I approach every project.”
“I trained my first production segmenter on industrial scans within a week. The labelling and class-imbalance modules saved me from rebuilding the dataset twice.”
“The region-growing plus learned-feature pipeline cut our manual classification work in half on a 600M-point urban dataset. We finally retired the spreadsheet.”
“What I needed was someone showing me how to evaluate a segmenter, not just train one. The metrics module is the part most courses skip and the part that matters.”
Get lifetime access
One payment. Every algorithm, every lesson, every update.
3D Object Detection Engine
Complete detection curriculum + Python source code + lifetime updates
- 44 structured lessons (22+ hours)i
- Complete Python source code
- RANSAC, DBSCAN, PCA, KD-Tree
- SAM for 3D bonus module
- Lifetime access + all future updatesi
- 90-day results guaranteei
Zero-risk guarantee: If you don’t see real results within 90 days, I’ll refund you in full. No questions.
The complete ecosystem
3D AI Architect Program
The complete spatial AI curriculum, delivered in 3 tiers. Pick the depth that matches where you are — Foundations to get moving, Professional for the full OS stack, Ultimate for live access and priority support.
- 3D AI Acceleratori: 17 episodes in 6 acts
- 3D Course Libraryi: 24+ standalone courses
- All 4 OS courses (Professional & Ultimate tiers)
- Neurones 3D software access
- Monthly drop-in sessions with Dr. Poux (Ultimate)
- Spatial AI job and market intel
- Priority support + services access (Ultimate)
- 300+ hours of content
What you’re getting access to
Everything I’ve built over 12+ years, from land surveying in the field to advising 15M EUR startups, compressed into one curriculum you can start today. Delivered by the first QUALIOPI-certified 3D geospatial academy.
Every pipeline was battle-tested on Fortune 500 projects processing billions of points. You’re getting the real playbook, not theory.
Methods validated by peer-reviewed publications, the ISPRS scientific community, and 1,500+ academic citations. Not guesswork.
Built by someone who surveyed in the field, defended a PhD, advised funded startups, and shipped products to Fortune 500 clients.
I share more free content than most people put behind a paywall. That’s intentional. I want you to know exactly what you’re getting before you invest. This course is the concentrated, structured version of everything I know. No fluff. No filler. Just the production path.
Find the right path for you
From single courses to the complete ecosystem.
| Feature | Standalone Course | 3D Object Detection Engine | Course Library | 3D AI Architecti | Enterprise |
|---|---|---|---|---|---|
| Courses included | 1 topic | 6 modules (44 lessons) | Full catalogi | 3 OS courses + Library (tiered) | Custom |
| Hours of content | 2-8h | 22+ hours | 150+ hours | 300+ hours (tiered) | Custom |
| Production source code | ✓ | ✓ | ✓ | ✓ | ✓ |
| Lifetime access | ✓ | ✓ | – | ✓ | ✓ |
| 3D AI Accelerator Tracki | – | – | – | ✓ | ✓ |
| Neurones 3D softwarei | – | – | – | ✓ | ✓ |
| Spatial AI job & market inteli | – | – | – | ✓ | ✓ |
| Monthly drop-in sessionsi | – | – | – | ✓ | ✓ |
| Priority support + services accessi | – | – | – | ✓ tiered | ✓ |
| Custom onboardingi | – | – | – | – | ✓ |
| Team licensing | – | – | – | – | ✓ |
| Price | €97 – €497 | €297 | €1,297 | Starts at €1,999 | On request |
Straight answers
Do I need a GPU?
No. The classical stack (RANSAC, DBSCAN, PCA, KD-Tree) runs on CPU. Only the bonus SAM for 3D module benefits from a GPU, and even then you can use free Colab.
Do I need prior 3D experience?
No. I build the 3D math, data handling, and visualization tooling from the ground up. You need basic Python skills.
Is this a deep learning course?
No, it’s a classical detection course. The bonus module plugs in SAM (a foundation model) for 3D, but the core engine is algorithmic. For 3D deep learning, see 3D Deep Learning Foundations.
Why does classical detection still matter in 2026?
Because it runs fast, needs no training data, and handles edge cases where learned methods hallucinate. Every production 3D pipeline I’ve shipped mixes classical and learned components. Classical is the foundation.
How long do I have access?
Lifetime. One payment, permanent access. Every future update included.
What’s the refund policy?
90 days. Build a detector, run it on your data. If you don’t see results, email me for a full refund.
Do I get the code?
Yes. Full Python repo. Every algorithm, every visualization, every evaluation script.
Can I combine this with a deep learning course?
Absolutely. Classical + learned is the production pattern. Pair this with 3D Deep Learning Foundations for a complete detection toolkit.
Not sure if this course fits?
If you have specific questions about how the curriculum applies to your role, your team’s needs, or your technical background, I’m happy to help you figure it out before you commit.
Book a 15-min call